|
PTZ CAMERA PELCO D |
Octobre 2025 |
|

|
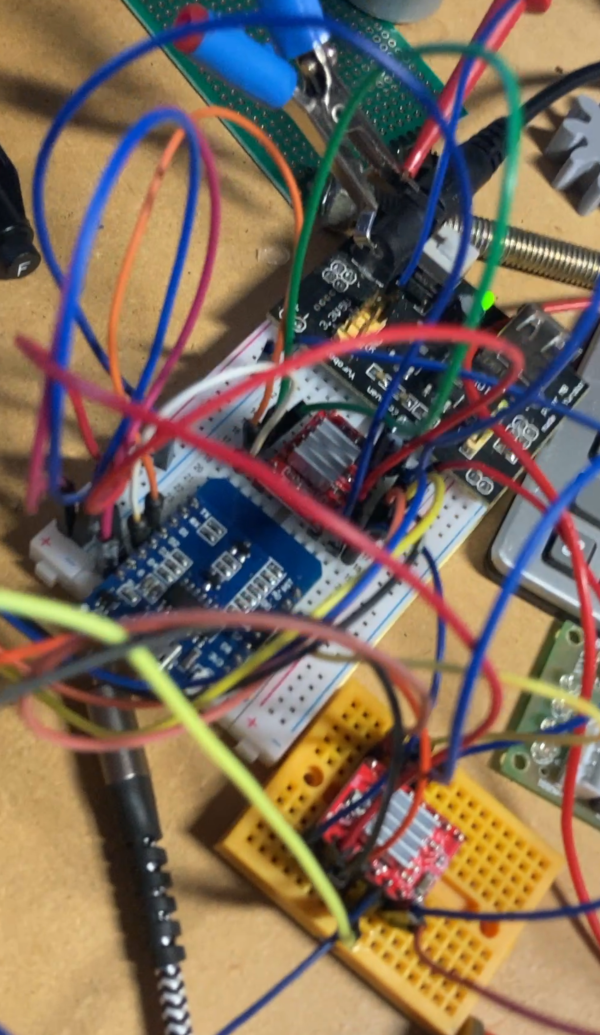
Après un premier test en fils volants :
 Après un second test sur une plaque à trous :
Après un second test sur une plaque à trous :
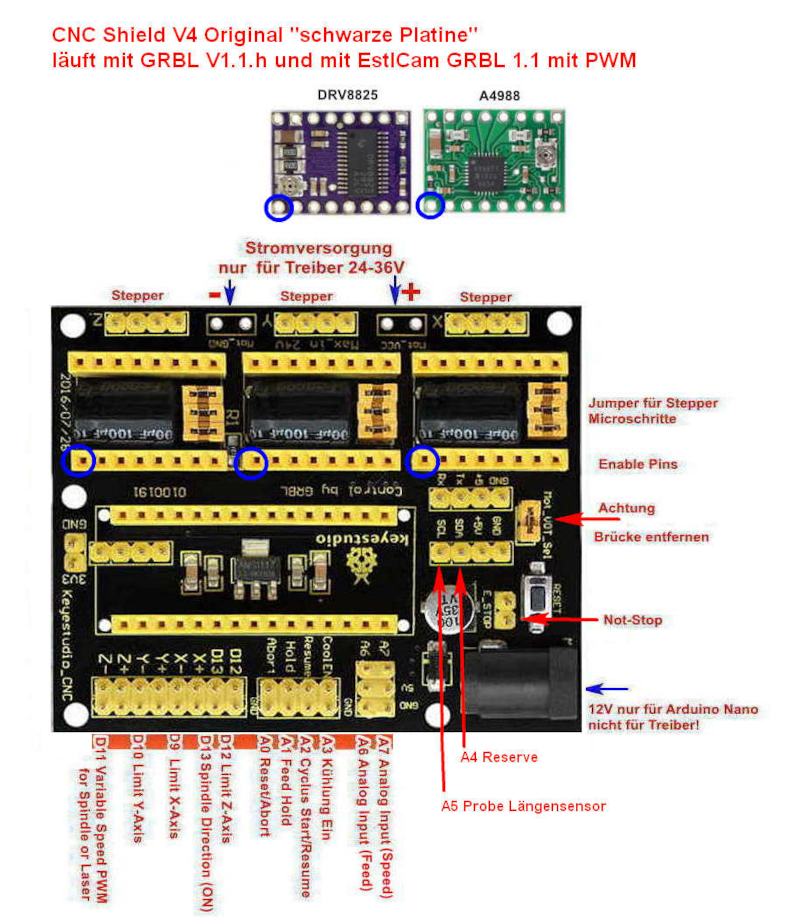
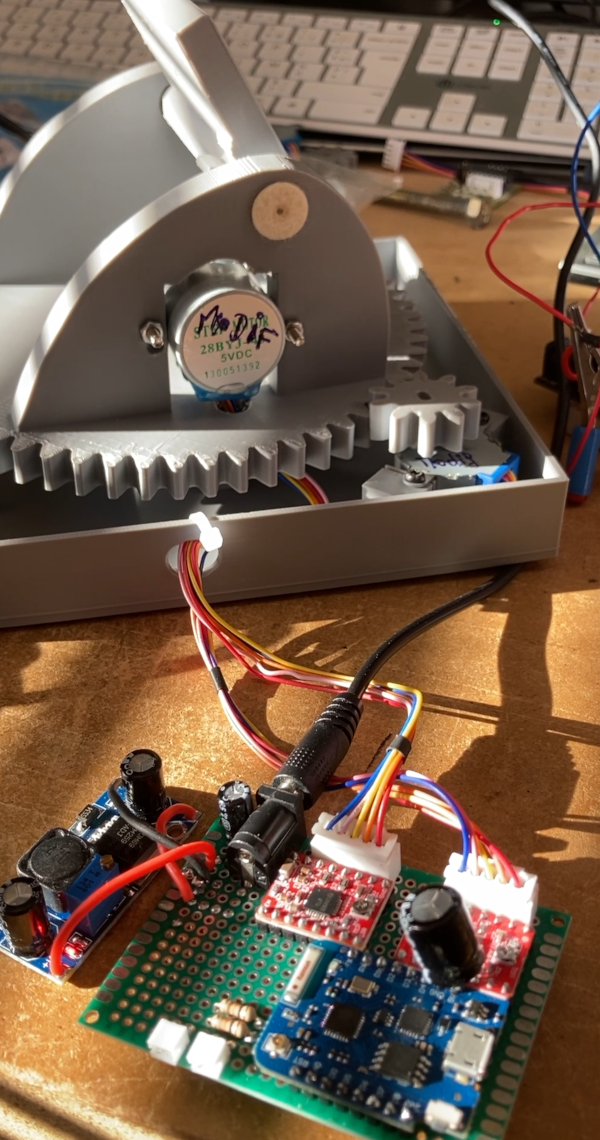 j'ai opté pour l'utilisation d'un PCB destiné normalement à un Arduino nano.
j'ai opté pour l'utilisation d'un PCB destiné normalement à un Arduino nano.
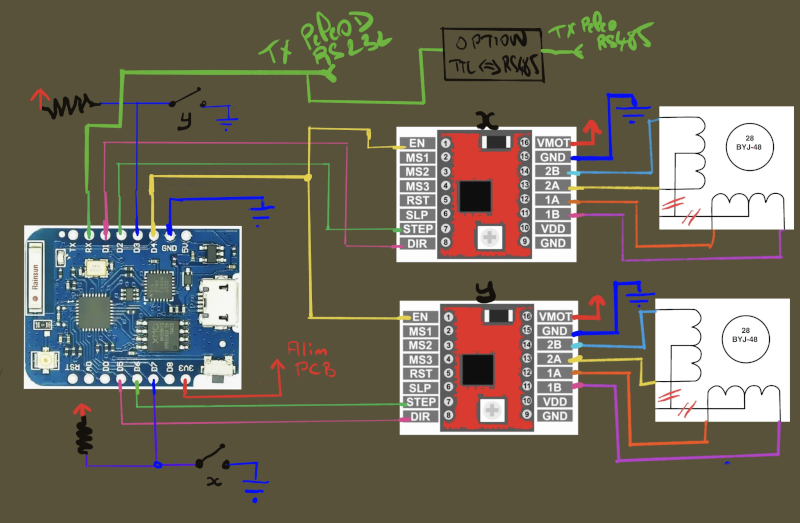
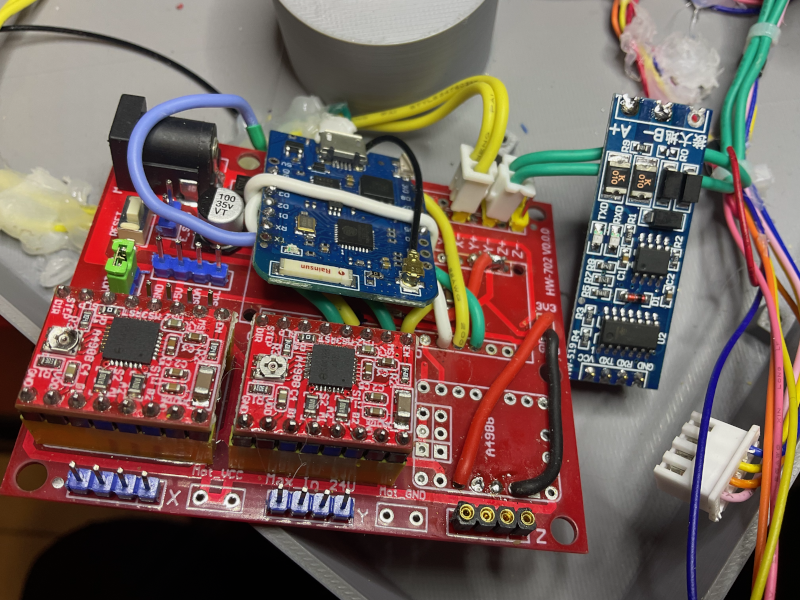 L'utilisation de ce PCB va nous simplifier la vie, tout le câblage de l'alim et des deux drivers va être réutilisé.
L'utilisation de ce PCB va nous simplifier la vie, tout le câblage de l'alim et des deux drivers va être réutilisé.
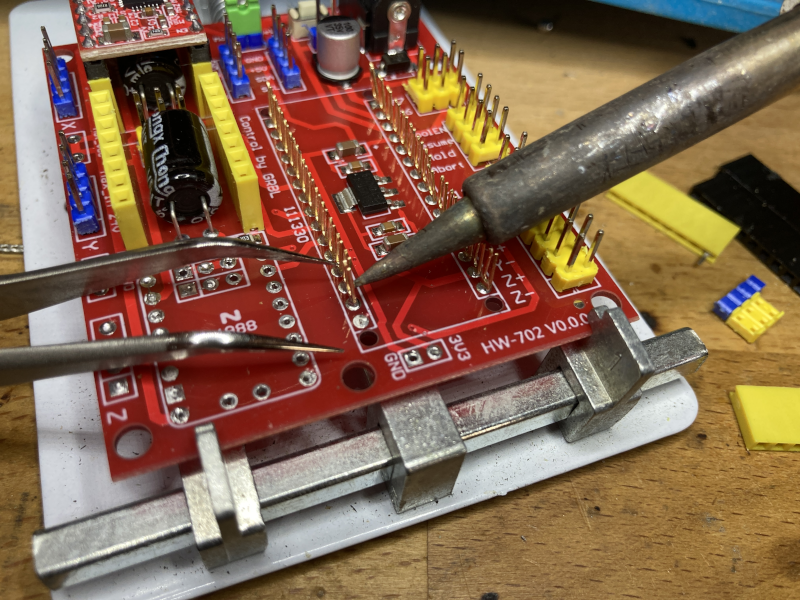
 De nombreux supports de CI vont devoir être dessoudé, ceci va très vite, on soulève le plastique (jaune ou bleu sur photo),
on chauffe chaque PIN une par une et avec une pince on soulève la PIN (ceci pour l'Arduino, le troisième driver et quelques broches de test latéraux).
De nombreux supports de CI vont devoir être dessoudé, ceci va très vite, on soulève le plastique (jaune ou bleu sur photo),
on chauffe chaque PIN une par une et avec une pince on soulève la PIN (ceci pour l'Arduino, le troisième driver et quelques broches de test latéraux).
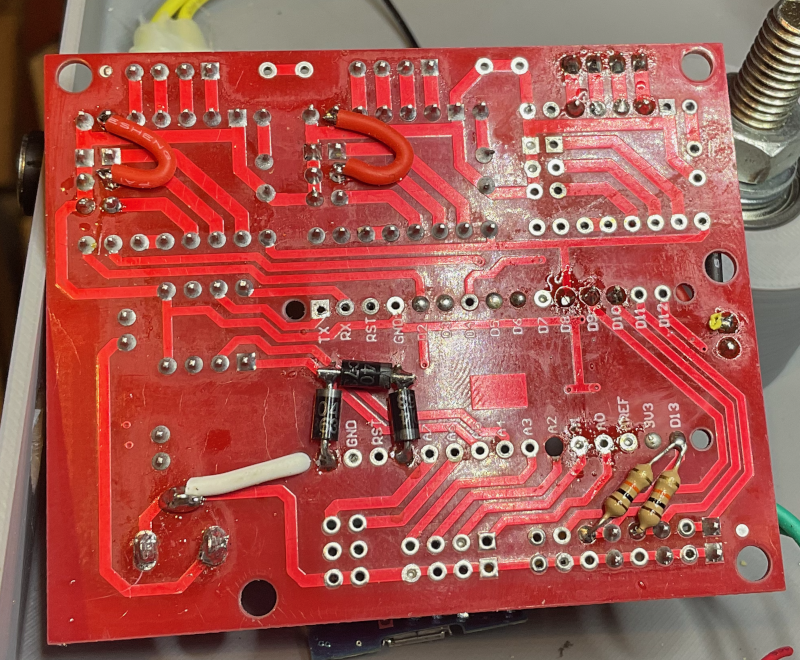
 Sur la face arrière du PCB il faut souder les deux résistances de rappel (10k) les trois diodes (montées en série) ainsi que des fils pour utiliser les deux drivers en mode demi-pas
(cette modif est du au fait qu'une erreur de câblage sur le PCB d'origine positionne les broches de choix du mode de pas moteur au - alors qu'il doivent être
forcées au + les straps du PCB sont donc inutilisables !). Le fil blanc ne sert à rien d'autre qu'à la fixation physique de l'ESP pour éviter qu'il gène la roue dentée.
Sur la face arrière du PCB il faut souder les deux résistances de rappel (10k) les trois diodes (montées en série) ainsi que des fils pour utiliser les deux drivers en mode demi-pas
(cette modif est du au fait qu'une erreur de câblage sur le PCB d'origine positionne les broches de choix du mode de pas moteur au - alors qu'il doivent être
forcées au + les straps du PCB sont donc inutilisables !). Le fil blanc ne sert à rien d'autre qu'à la fixation physique de l'ESP pour éviter qu'il gène la roue dentée.