

 |
PTZ CAMERA PELCO D |
Octobre 2025 |
|

|
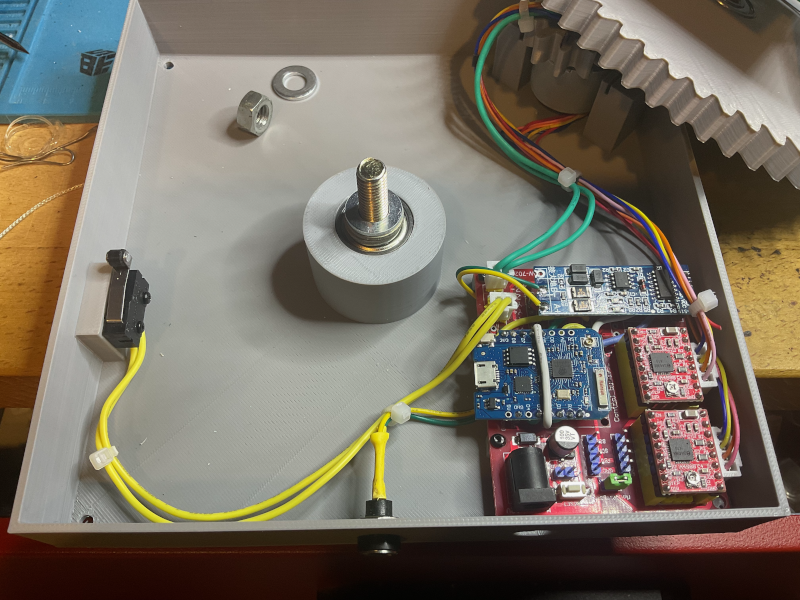
Cette partie supporte l'ensemble du montage. Le moteur de traction horizontale est fixé dans un coin à l'aide de renfort qui permettent un positionnement précis.
Elle comporte un renfort pour la fixation du fin de course horizontal ainsi qu'un renfort circulaire
central pour y insérer deux roulements (un marteau est nécessaire pour un ajustement serré !) l'un qui se positionne par le dessous et l'autre par le dessus.
Ces deux roulements permettent à la vis centrale d'être fermement maintenue sans jeu latéral. Des renforts pour la fixation de la platine électronique sont également
prévus. Trois trous sont prévus sur la face latéral 1 pour l'alim 12v, 1 pour l'entrée RS485/RS232, 1 pour l'antenne WiFi externe.
Quatre trous sont également prévus en fond pour une fixation éventuelle sur un support externe.



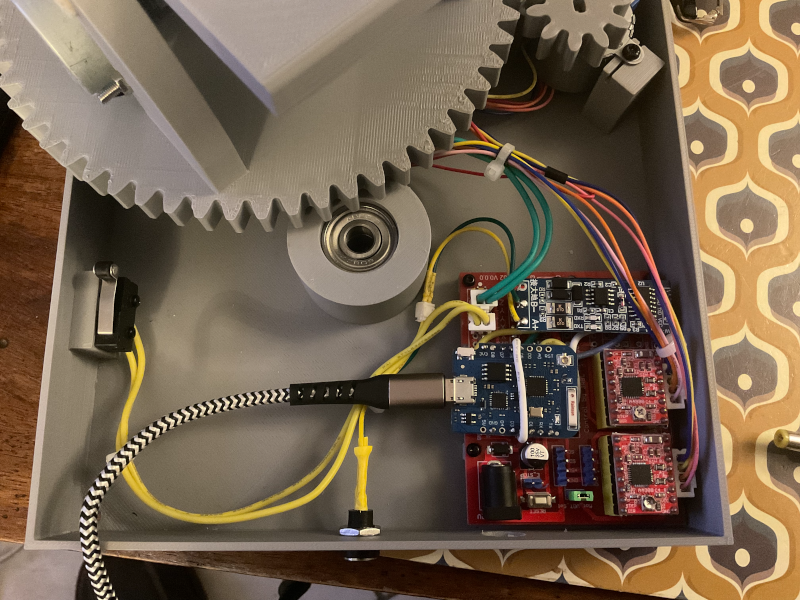
La fonction principale de cette grande roue est d'assurer la rotation horizontale.
Elle supporte le moteur de la balance verticale ainsi que le fin de course de la balance.
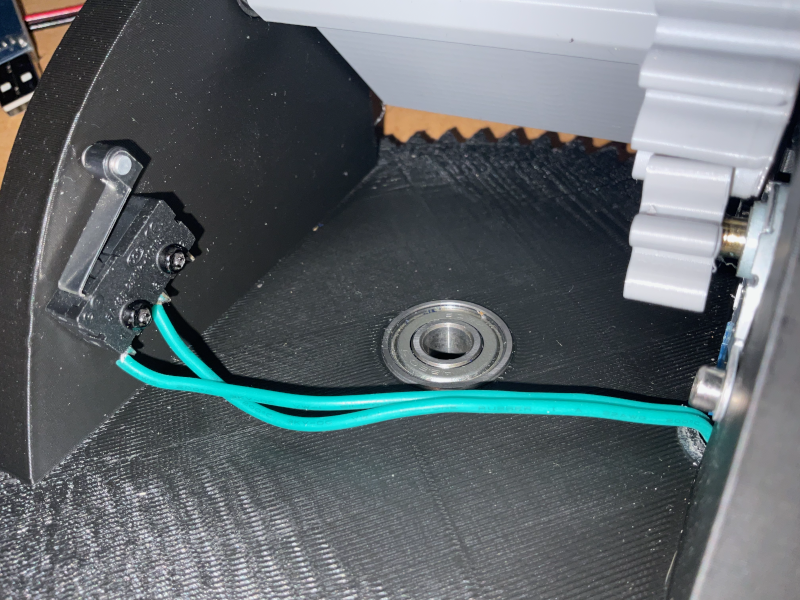
Un petit trou est également prévu pour insérer une vis à tête ronde qui va venir déclencher
le fin de course de la base. Un emplacement est également prévu pour le roulement supérieur
il faut prévoir deux rondelles dessous et une rondelle au dessus ainsi que l'écrou.
Le support dispose également de deux emplacements pour des roulements plus petit qui vont
supporter l'axe de la balance suppérieur. Un trou est prévu sous le moteur pour passage
des fils vers la base.

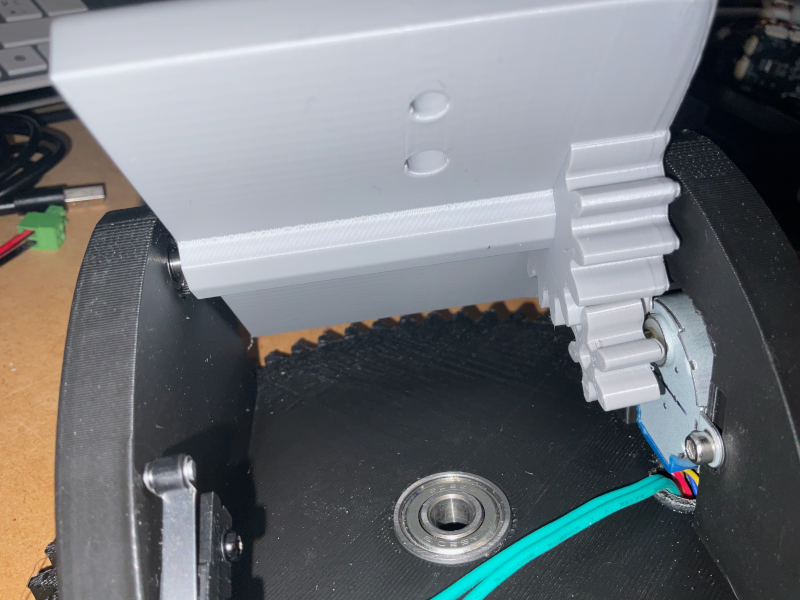
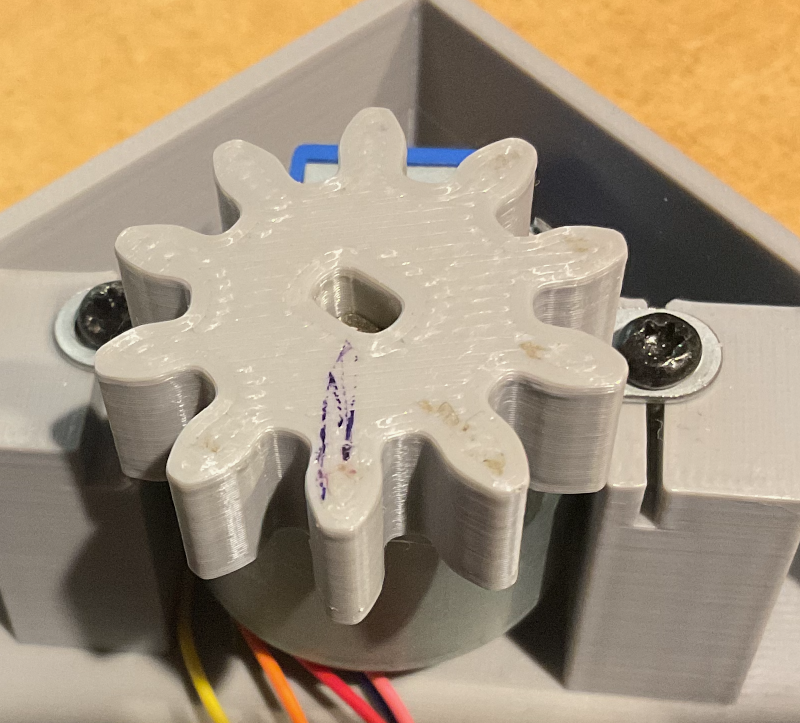
Cette petite roue (10 dents) entraine la grande roue horizontale.
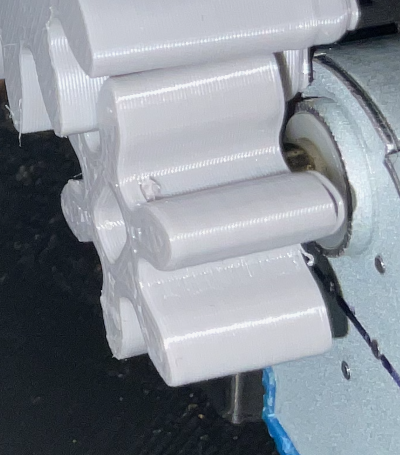
Ce balancier est traversé par un axe acier, un engrenage est entrainé en rotation par le moteur vertical.
Deux trous sont prévus pour la fixation d'une caméra ou d'un appareil photo.

Cette toute petite roue (6 dents) entraine le balacier suppérieur, elle est fixée sur le moteur vertical.
Un couvercle vient terminer cette réalisation afin de cacher un peu les fils et le moteur horizontal.
