

 |
PTZ CAMERA PELCO D |
Octobre 2025 |
|

|
Les moteurs : Deux moteurs pas à pas sont nécessaire, l'un pour le déplacement horizontal et l'autre pour la bascule verticale.
J'ai décidé d'utiliser des moteurs "28BYJ-48 en 5 volts" vraiment bon marché (quelques euros) 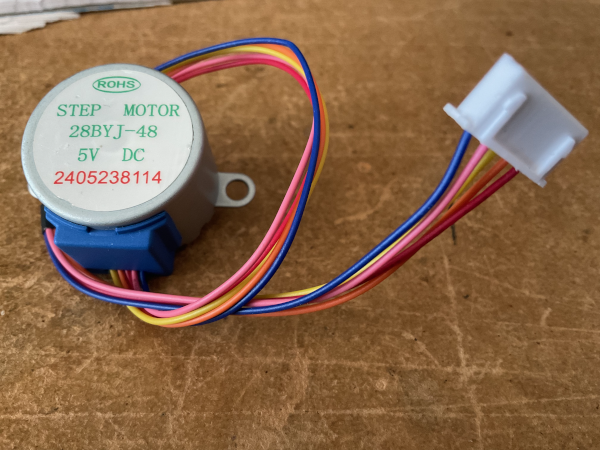 pour commander ces moteurs je me suis décidé à utiliser deux drivers A4988 (très bon marché également).
pour commander ces moteurs je me suis décidé à utiliser deux drivers A4988 (très bon marché également).
 Les problèmes commencent ! les drivers sont prévus pour des moteurs 4 fils bipolaire alors que les moteurs choisis
sont des 5 fils unipolaire. Il va donc être nécessaire de les adapter (on trouve facilement sur youtube des démos pour réaliser cela. Un site explique aussi cela très bien
voir ici. Je ne vais donc donné ici qu'une explication succincte.)
Les problèmes commencent ! les drivers sont prévus pour des moteurs 4 fils bipolaire alors que les moteurs choisis
sont des 5 fils unipolaire. Il va donc être nécessaire de les adapter (on trouve facilement sur youtube des démos pour réaliser cela. Un site explique aussi cela très bien
voir ici. Je ne vais donc donné ici qu'une explication succincte.)
L'idée consiste à couper le lien milieu des deux bobines.
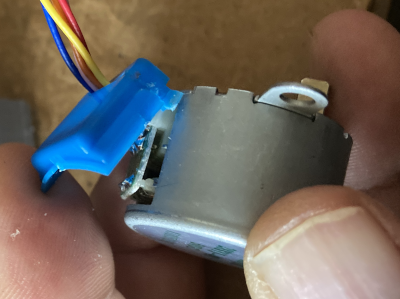 On coupe la piste du fil rouge.
On coupe la piste du fil rouge.
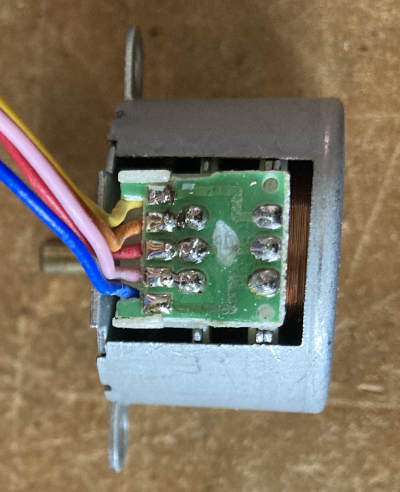 On a ensuite deux bobines indépendantes.
On a ensuite deux bobines indépendantes.
Il faut ensuite repérer les quatres fils afin de pouvoir utiliser les drivers.
 (Remplacement du connecteur 5 broches par un connecteur 4 broches ordre : "Rose Orange Jaune Bleu").
(Remplacement du connecteur 5 broches par un connecteur 4 broches ordre : "Rose Orange Jaune Bleu").
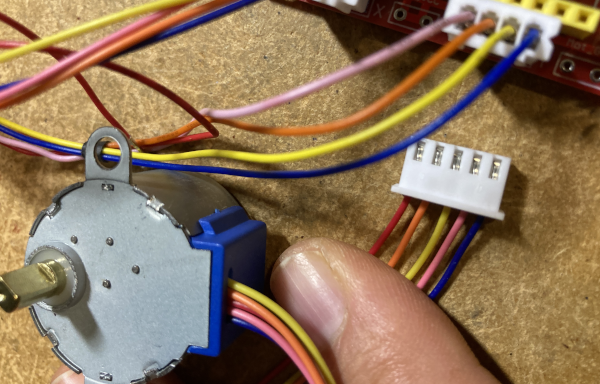 Modif des connecteurs.
Modif des connecteurs.
Nous allons utiliser ces moteurs 5 volts en 12 volts afin de gagner du couple par contre nous limiterons l'intensité par un réglage sur les drivers. Le driver nous permettra également de travailler par des demis-pas.
Une commande sur le driver nous permettra également de libérer l'excitation des moteurs lorsqu'il ne sont pas utilisés ceci évitera tout échauffement. Pour la commande des drivers nous utiliserons la librairie "accelstepper" qui commandera
deux commandes "Step" (nb de pas) et "dir" (direction) pour chaque moteur. la commande "enable" (libere l'alimentation des moteurs) sera commune aux deux moteurs.
Prévoir quelques vis pour la fixation des deux moteurs.
Deux micros-contact sont utilisés pour gérer les fins de course.
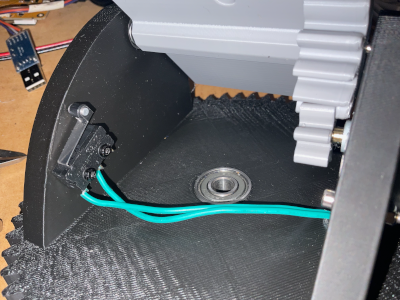 Fin de course vertical (limite du balancier).
Fin de course vertical (limite du balancier).
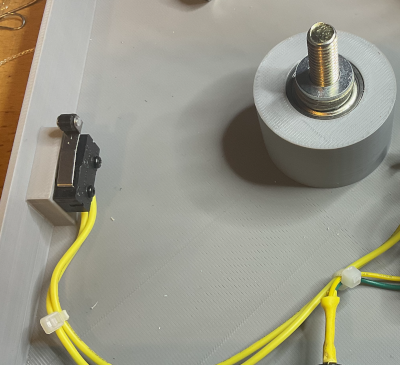 Fin de course horizontal (limite le déplacement de la plateforme).
Fin de course horizontal (limite le déplacement de la plateforme).
Prévoir également un boulon d'une longueur de xxx d'un diamètre de xxx ainsi que des rondelles et écrous.
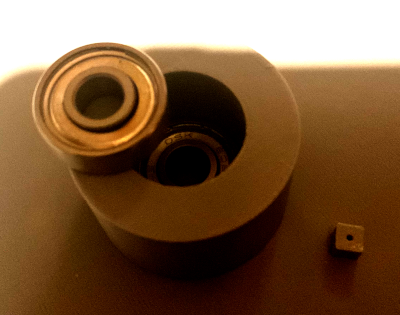 Trois roulements d'un diamètre de xxx sont nécessaires pour le mouvement de la plateforme.
Trois roulements d'un diamètre de xxx sont nécessaires pour le mouvement de la plateforme.
 Deux roulements d'un diamètre de xxx sont nécessaires pour le mouvement de la bascule.
Deux roulements d'un diamètre de xxx sont nécessaires pour le mouvement de la bascule.
Prévoir également un axe métallique d'un diamètre de xxx et d'une longueur de 10 cm.
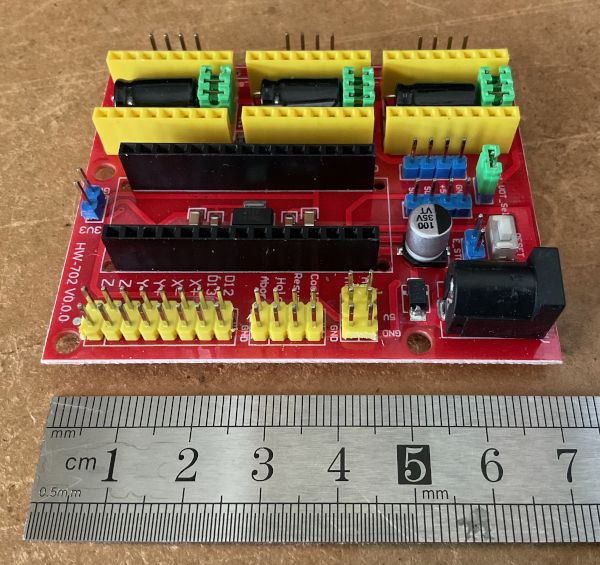
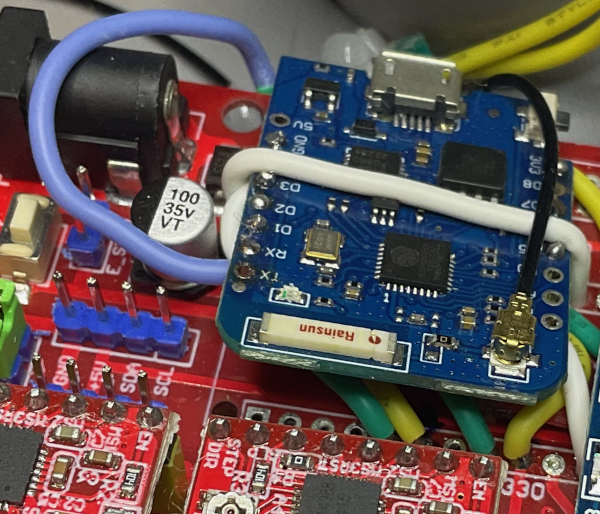
Pour le câblage, je ne me suis pas lancé dans la construction d'un circuit imprimé mais j'ai préféré détourner
un circuit utilisé pour construire des CNC Arduino (CNC Shield V4). Ce circuit est normalement prévu pour être utilisé avec un circuit "Arduino nano"
je vais le modifier pour l'utiliser avec un ESP 8266 (Wemos D1 pro). L'avantage de cette solution est principalement
le prix. En effet ce circuit est tellement répandu qu'on le trouve partout, qu'il est vendu en kit avec des drivers pour seulement
6 ou 7 euros ! Pour ce prix le câblage du montage est très simplifié, on a une alim, des drivers des connecteurs adaptés (et un Arduino nano qui ne servira pas ici !).
Le processeur utilisé est donc un ESP8266 Wemos D1 Pro,
ce choix est lié à la possibilité d'utiliser une antenne Wifi extérieur.
Pour utiliser l'antenne extèrieur il est nècessaire de déplacer un strap CMS sur la platine
(vous trouverez sur ce site de nombreux montage ou cette opération est décrite).
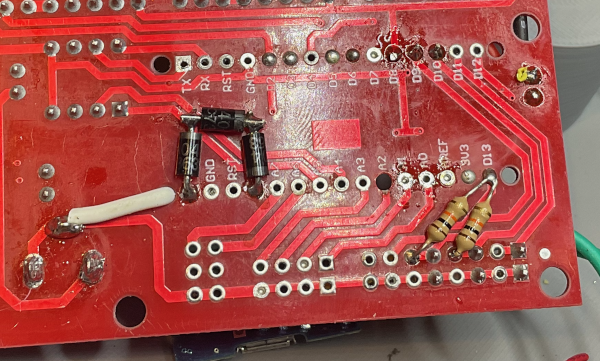
Toutes les pins GPio disponibles sur l'esp seront utilisées.
Deux résistances de rappel de 10k seront nécessaires pour les contacts de fin de course.
Trois diodes 1N4004 seront utilisées pour diminuer la tension avant le régulateur de 3v3 (ça chauffe un peu moins !).
La sortie Pelco des caméras chinoise est assurée par un type de connecteur peu commun !
On les trouve sous la dénomination "Phoenix connecteur 2 broches".
Il faut également prévoir une prise 2 fils (un seul fil utilisé) coté boitier.

Pour utiliser une caméra chinoise 4K, il est utile de partager l'alimentation 12v entre la caméra et notre montage,
ceci est possible avec un Câble double alim 12v.

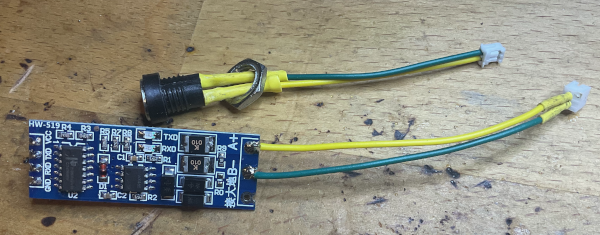
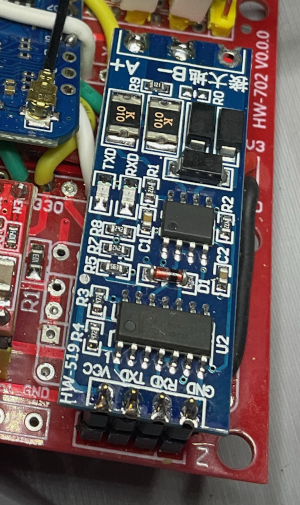
Pour utiliser l'interface 485 des caméras chinoise,
il est prévu dans le montage un emplacement pour un convertisseur TTL <=> 485.
Cette config reste optionnelle dans ce montage.
Ajouter à cette liste "Divers fils de câblage" et du "PLA" pour les impressions 3D.