

 |
PTZ CAMERA PELCO D |
Octobre 2025 |
|

|
Le protocole Pelco-D est ancien mais il est disponible dans de nombreuse caméras. Pour les commandes de base de direction "pan" et "tilt" des blocs de 7 octets sont utilisés. Dans mon cas je vais me contenter de décoder les signaux "up", "down, "left" et "right". Il existe de nombreuses autres séquences pour des accès en diagonale, des accès en absolu, des reset, des positions définis. j'ai pas mal galéré pour trouver de la doc, je vous propose le lien suivant qui donne pas mal de détail sur le protocole et les séquences.
| Format | [FF] | [Adresse] | [Commande 1] | [Commande 2] | [Data 1] | [Data 2] | [Checksum] |
| Up | FF | 01 | 00 | 08 | 00 | 01à3F | 01àFF |
| Haut | FF | 01 | 00 | Cmd Haut | 00 | Vitesse Verticale |
Checksum |
| |
-- | -- | -- | ------------ | ------------- | -- | -- |
| Down | FF | 01 | 00 | 10 | 00 | 01-3F | 01àFF |
| Bas | FF | 01 | 00 | Cmd Bas | 00 | Vitesse Verticale |
Checksum |
| |
-- | -- | -- | ------------ | ------------- | -- | -- |
| Right | FF | 01 | 00 | 02 | 01à3F | 00 | 01àFF |
| Droite | FF | 01 | 00 | 02 | Vitesse Horizontale |
00 | Checksum |
| |
-- | -- | -- | ------------ | ------------- | -- | -- |
| Left | FF | 01 | 00 | 04 | 01à3F | 00 | 01àFF |
| Gauche | FF | 01 | 00 | 04 | Vitesse Horizontale |
00 | Checksum |
| |
-- | -- | -- | ------------ | ------------- | -- | -- |
Normalement le protocole Pelco D est exploité sur une interface RS485 (Série longue distance en 12v deux fils A+ et B-)
vitesse de transmission 2400 bauds 8 bits sans parité. Pour l'exploiter avec un microprocesseur (niveau de tension entre 3v3 et 5 volts)
il faut utiliser une mise à niveau des signaux RS485 (2fils) <=> TTL RS232 simplifiée (2 fils plus la masse)
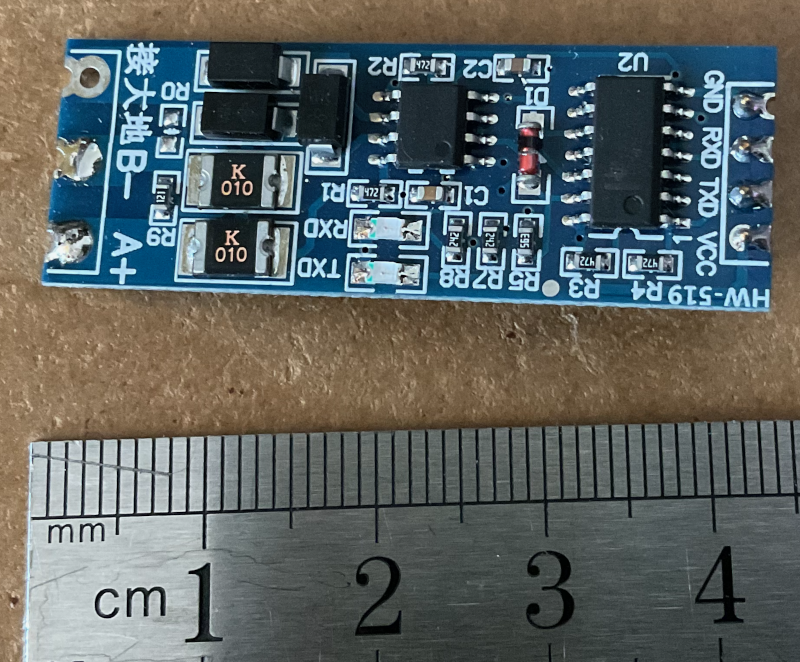 Pour le montage j'ai pensé au début que ma caméra chinoise était à la norme RS485 mais aprés de nombreuse heures à ne pas comprendre pourquoi
je ne recevais aucune info, j'ai fin par comprendre (avec l'aide de l'oscilloscope) que le signal fourni par ma caméra "made in china" fournissait
l'interface à une norme proche de RS232 simplifiée à la vitesse de 9600 bauds à des niveaux proche de 3 volts. Une liaison direct vers le processeur était alors possible, c'est pourquoi
le module TTL <=> RS485 est devenu optionnel. Le petit truc de l'interface de la caméra chinoise est "subtile" il présente un câble deux fils Pelco-D (émission/réception)
mais pour exploiter ces signaux il faut utiliser la masse de la caméra qui est donc sur un autre câble ! Pour résoudre ce problème il faut donc utiliser
sur notre montage la même alimentation que celle de la caméra d'ou le petit câble "double alim 12v" présenté à la page "matos". Coté interface pelco nous n'avons donc besoin que d'un des deux
fils et coté esp nous n'utiliserons donc que le fil réception, aucune émission vers la caméra n'étant au programme !
Pour le montage j'ai pensé au début que ma caméra chinoise était à la norme RS485 mais aprés de nombreuse heures à ne pas comprendre pourquoi
je ne recevais aucune info, j'ai fin par comprendre (avec l'aide de l'oscilloscope) que le signal fourni par ma caméra "made in china" fournissait
l'interface à une norme proche de RS232 simplifiée à la vitesse de 9600 bauds à des niveaux proche de 3 volts. Une liaison direct vers le processeur était alors possible, c'est pourquoi
le module TTL <=> RS485 est devenu optionnel. Le petit truc de l'interface de la caméra chinoise est "subtile" il présente un câble deux fils Pelco-D (émission/réception)
mais pour exploiter ces signaux il faut utiliser la masse de la caméra qui est donc sur un autre câble ! Pour résoudre ce problème il faut donc utiliser
sur notre montage la même alimentation que celle de la caméra d'ou le petit câble "double alim 12v" présenté à la page "matos". Coté interface pelco nous n'avons donc besoin que d'un des deux
fils et coté esp nous n'utiliserons donc que le fil réception, aucune émission vers la caméra n'étant au programme !
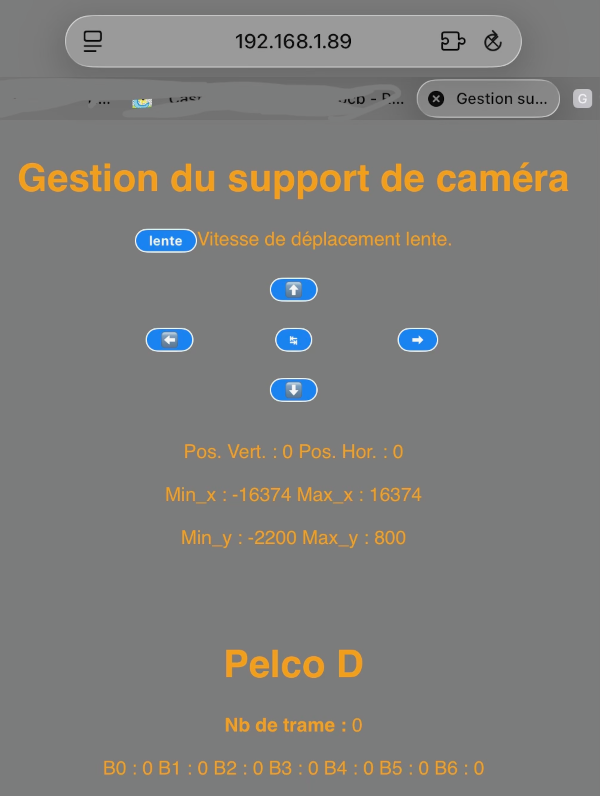
Pour le "fun" vous pouvez voir les commandes Pelco recues sur la page html de l'interface Wifi.
Pour des caméra type "Webcam" ou "Appareil photo" ici pas de pelco possible, il est pourtant bien pratique de pouvoir les diriger à distance pour certains besoins.
C'est là que l'interface HTML prend tout son sens ! Cette page permet de diriger la caméra horizontalement et verticalement. Il est également possible de choisir
entre deux vitesses de déplacement et de revenir à la position d'initialisation.
 Afin de pouvoir gèrer les des réceptions Pelco sur l'interface série et en simultané des commandes de déplacement
en Wifi une méthode de serveur web particulière "asynchrone" à du être mise en oeuvre dans le code C++ de l'ESP.
Afin de pouvoir gèrer les des réceptions Pelco sur l'interface série et en simultané des commandes de déplacement
en Wifi une méthode de serveur web particulière "asynchrone" à du être mise en oeuvre dans le code C++ de l'ESP.